Robotische Chirurgie: Vier Hände sind besser als zwei
Robotiker und Robotikerinnen der EPFL haben die Manipulation mehrerer Gliedmassen mit einer gemeinsamen Steuerung kombiniert und damit einen beispiellosen Fortschritt auf dem Gebiet der laparoskopischen Chirurgie erzielt. Die im The International Journal of Robotics Research veröffentlichten Ergebnisse bestätigen die Machbarkeit dieser Einrichtung zur Verringerung der Arbeitsbelastung des Chirurgen oder der Chirurgin sowie zur Verbesserung der Genauigkeit und Sicherheit. Spezialistinnen und Spezialisten wurden bereits erfolgreich in diesem System geschult, und in Genf werden derzeit klinische Versuche durchgeführt.
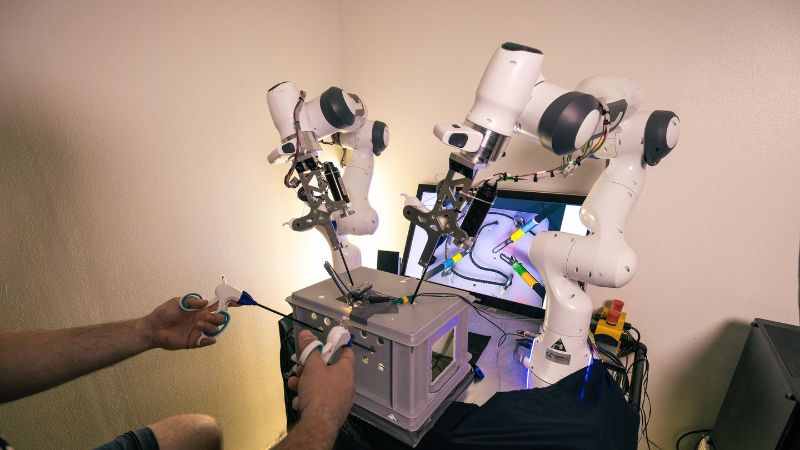
Dank der engen Zusammenarbeit zwischen der REHAssist-Forschungsgruppe und dem Labor für Algorithmen und Lernsysteme (LASA) konnten die Doktoranden Jacob Hernandez und Walid Amanhoud zusammen mit einem Forschungsteam ein System entwickeln, mit dem Chiruginnen und Chirurgen zusätzlich zu ihren beiden Armen zwei Roboterarme über haptische Fussschnittstellen mit fünf Freiheitsgraden steuern können. Jede Hand steuert ein Manipulationswerkzeug, während ein Fuss die Kamera oder das Endoskop und der andere eine motorisierte Zange steuert. Eine der wichtigsten Innovationen dieses Systems ist die gemeinsame Kontrolle zwischen der Chirurgin und den robotischen Assistenten. Dank der Kontrollstruktur arbeiten der Chirurg und die Roboter in einem Raum zusammen und gewährleisten dabei die Präzision und Sicherheit, die bei der laparoskopischen Chirurgie absolut notwendig sind.
Mohammed Bouri, Leiter der REHAssist-Gruppe, sagt: «Die Aktuatoren der Pedale geben dem Benutzer oder der Benutzerin haptische Informationen, die den Fuss zum Ziel führen, als ob er oder sie einem unsichtbaren Kraftfeld folgen würde, wobei sichergestellt wird, dass falsche Bewegungen den Patienten nicht gefährden. Unser System eröffnet Chirurginnen neue Möglichkeiten, laparoskopische Eingriffe vierhändig durchzuführen, so dass eine Person eine Aufgabe übernehmen kann, die normalerweise von zwei, manchmal sogar drei Personen ausgeführt wird.»
Minimierung der Müdigkeit
Bei der so genannten geteilten Kontrolle übernimmt die Robotik manchmal die Kontrolle des Chirurgen über das Instrument, da sie voraussieht, wohin sich der Chirurg bewegen möchte. Beim Knüpfen eines Knotens zum Beispiel passt sich das Endoskop an die richtige Position an und die Zange kann sich spreizen.
«Vier Arme gleichzeitig zu kontrollieren, noch dazu mit den Füssen, ist alles andere als Routine und kann ermüdend sein. Um die Kontrolle weiter zu verbessern, beinhaltet das System eine adaptive visuelle Verfolgung der Laparoskopie-Instrumente mit der Kamera und der Greifhilfe für die Zange. Darüber hinaus wird eine Unterstützung für ein präziseres Greifen von Gewebe angeboten», erklärt Prof. Aude Billard, Leiterin des LASA. Mohamed Bouri fügt hinzu: «Durch den Einbau von fussgesteuerten Roboterassistenten und gemeinsamen Kontrollstrategien reduzieren wir die mentale und physische Belastung der Chirurginnen und Chirurgen und hoffen, dass sich die chirurgischen Ergebnisse verbessern werden».
Zusammenarbeit mit Chirurginnen und Chirurgen
Eine detaillierte Studie mit praktizierenden Chirurgen und Chirurginnen wurde durchgeführt, um die Benutzerfreundlichkeit und Wirksamkeit des Systems zu bewerten. Laut Dr. Enrico Bronnimann, der in Zusammenarbeit mit der Schweizerischen Stiftung für Innovation und Ausbildung in der Chirurgie (SFITS) an den laufenden klinischen Studien teilgenommen hat, «ist die Idee, seine Füsse aktiv zu benutzen, um eine robotergestützte Operation durchzuführen, eine gute Idee und sicherlich eine Fähigkeit, die man erlernen kann. Ich würde sie gerne im Operationssaal umgesetzt sehen, vielleicht in Form eines Cockpits, weit weg von der Patientin oder dem Patienten, um die Ergonomie zu verbessern».
Während das System weiterhin getestet und verbessert wird, bestätigen die in dieser Studie veröffentlichten Ergebnisse die Machbarkeit von chirurgischen Aufgaben, die vierhändig und ohne umfassende Schulung durchgeführt werden können. Es wurde gezeigt, dass die im System implementierten Strategien zur geteilten Steuerung die Aufgabenbelastung reduzieren, die Leistung verbessern, den Fluss erhöhen und die Koordination während laparoskopischer Aufgaben fördern können.
