Ein geflügelter Roboter, der wie ein Vogel landen kann
Ein Vogel, der auf einem Ast landet, lässt das Manöver wie die einfachste Sache der Welt aussehen, aber in Wirklichkeit erfordert dieses Platznehmen ein äusserst delikates Gleichgewicht von Timing, hohen Kräften, Geschwindigkeit und Präzision. Diese Bewegung ist so komplex, dass sie bisher noch kein Schlagflügelroboter (Ornithopter) beherrscht hat – bis jetzt.
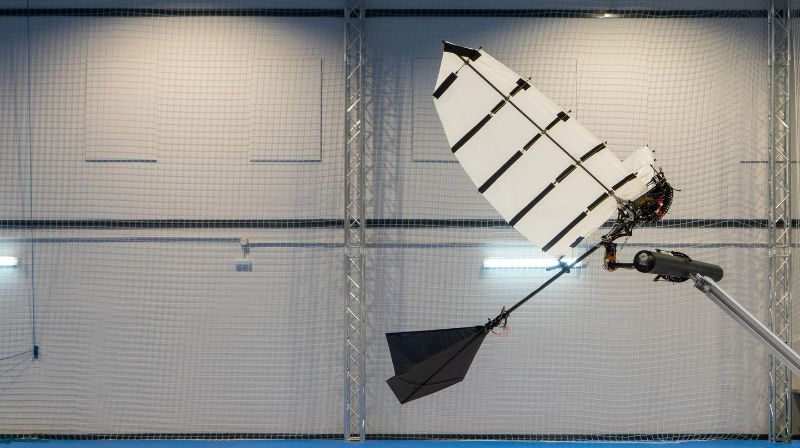
Raphael Zufferey, Postdoktorand im Labor für Intelligente Systeme (LIS) und Biorobotik Lab (BioRob) an der Fakultät für Ingenieurwissenschaften, ist Erstautor eines kürzlich erschienenen Artikels in Nature Communications, in dem das einzigartige Fahrwerk beschrieben wird, das ein solches Aufsetzen ermöglicht. Er baute und testete es in Zusammenarbeit mit Kollegen an der Universität von Sevilla, Spanien, wo der 700 Gramm schwere Ornithopter selbst im Rahmen des europäischen Projekts GRIFFIN entwickelt wurde.
«Dies ist die erste Phase eines grösseren Projekts. Wenn ein Ornithopter erst einmal die autonome Landung auf einem Ast beherrscht, hat er das Potenzial, bestimmte Aufgaben zu übernehmen, wie etwa das unauffällige Sammeln biologischer Proben oder Messungen an einem Baum. Letztendlich könnte er sogar auf künstlichen Strukturen landen, was weitere Anwendungsbereiche eröffnen würde», sagt Zufferey.
Er fügt hinzu, dass die Möglichkeit, auf einer Sitzstange zu landen, Ornithoptern – die wie viele unbemannte Luftfahrzeuge (UAVs) eine begrenzte Batterielebensdauer haben – eine effizientere Möglichkeit bieten könnte, sich mit Solarenergie aufzuladen, was sie möglicherweise ideal für Langstreckenmissionen machen würde.
«Dies ist ein grosser Schritt in Richtung des Einsatzes von Schlagflügelrobotern, die bisher eigentlich nur Freiflüge durchführen können, für Manipulationsaufgaben und andere reale Anwendungen», sagt er.
Maximierung von Stärke und Präzision, Minimierung von Gewicht und Geschwindigkeit
Die technischen Probleme, die mit der Landung eines Ornithopters auf einer Stange ohne externe Steuerung verbunden sind, erfordern das Management zahlreicher Faktoren, die die Natur bereits so perfekt ausbalanciert hat. Der Ornithopter muss in der Lage sein, sein Tempo beim Aufsitzen deutlich zu verlangsamen, ohne den Flug zu unterbrechen. Die Klaue muss stark genug sein, um die Stange zu greifen und das Gewicht des Roboters zu tragen, ohne so schwer zu sein, dass er nicht in der Luft gehalten werden kann: «Das ist ein Grund, warum wir uns für eine einzige Klaue entschieden haben und nicht für zwei», so Zufferey. Schließlich musste der Roboter in der Lage sein, seine Umgebung und die Sitzstange vor ihm im Verhältnis zu seiner eigenen Position, Geschwindigkeit und Flugbahn wahrzunehmen.
Die Forschenden erreichten all dies, indem sie den Ornithopter mit einem vollständigen Bordcomputer und einem Navigationssystem ausstatteten, das durch ein externes Bewegungserfassungssystem ergänzt wurde, um ihm bei der Bestimmung seiner Position zu helfen. Das Bein-Krallen-Anhängsel des Ornithopters wurde fein kalibriert, um die Auf- und Abschwingungen des Fluges auszugleichen, während er versucht, die Sitzstange anzupeilen und zu ergreifen. Die Klaue selbst wurde so konstruiert, dass sie den Vorwärtsimpuls des Roboters beim Aufprall absorbiert und sich schnell und fest schliesst, um sein Gewicht zu tragen. Wenn der Roboter einmal auf der Sitzstange sitzt, verbleibt er dort ohne Energieaufwand.
Trotz all dieser zu berücksichtigenden Faktoren gelang es Zufferey und seinen Kollegen, nicht nur einen, sondern gleich zwei klauenfüssige Ornithopter zu bauen, um ihre Ergebnisse beim Aufsitzen zu reproduzieren.
Mit Blick auf die Zukunft denkt Zufferey bereits darüber nach, wie ihr Gerät erweitert und verbessert werden könnte, insbesondere in einer Aussenumgebung.
«Im Moment werden die Flugexperimente in Innenräumen durchgeführt, weil wir eine kontrollierte Flugzone mit präziser Lokalisierung durch das Bewegungserfassungssystem benötigen. In Zukunft möchten wir die Autonomie des Roboters erhöhen, um im Freien in einer unvorhersehbareren Umgebung Sitzstangen- und Manipulationsaufgaben durchzuführen.»
