How to make self-folding surgical tools
A camel cannot go through the eye of a needle. But researchers at ETH Zurich have now achieved something that – figuratively speaking – comes quite close. They have developed a new approach to minimally invasive surgical instruments, thanks to which large objects can be brought into the body through a narrow catheter.
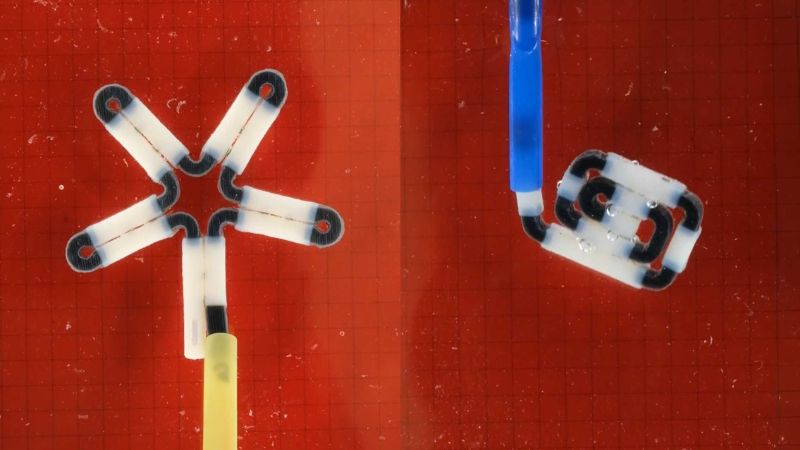
This works as follows: The researchers disassemble such devices into individual parts and then slide them through the catheter in a row, like a string of pearls. At the end of the catheter, the parts assemble themselves into a predefined shape thanks to built-in magnets.
In its research, the team – led by ETH doctoral student Hongri Gu, who is now a postdoc at the University of Konstanz – was primarily concerned with demonstrating the many possibilities of this new approach. In a relatively simple way and using 3D printing, the scientists also constructed an endoscopic grasper. Moreover, they showed that the new approach makes it possible to assemble an endoscope head consisting of three parts.
For their prototypes, the researchers combined soft, elastic segments with rigid segments, into which the tiny magnets are incorporated. This design method also makes it possible for an endoscope head to perform movements with very tight radii and angles that aren’t feasible with today’s endoscopes. This increased mobility broadens the possibilities when designing devices for minimally invasive surgery on organs such as the intestine or the stomach. The scientists published their demonstration study in the journal Nature Communications.
