Silicone raspberry used to train harvesting robots
Raspberries are the ultimate summer fruit. Famous for their eye-catching scarlet color and distinctive structure, they consist of dozens of fleshy drupelets with a sweet yet slightly acidic pulp. But this delicate structure is also their primary weakness, as it leaves them vulnerable to even the slightest scratch or bruise. Farmers know all too well that raspberries are a difficult fruit to harvest – and that’s reflected in their price tag. But what if robots, equipped with advanced actuators and sensors, could lend a helping hand? Engineers at EPFL’s Computational Robot Design & Fabrication (CREATE) lab have set out to tackle this very challenge.
Sky-high labor costs and shortages of workers cause farmers to lose millions of dollars’ worth of produce each year – and the problem is even more acute when it comes to delicate crops such as raspberries. But for now, there’s no viable alternative to harvesting the fruit by hand. “It’s an exciting dilemma for us as robotics engineers,” says Josie Hughes, a professor at CREATE. “The raspberry harvesting season is so short, and the fruit is so valuable, that wasting them simply isn’t an option. What’s more, the cost and logistical challenges of testing different options out in the field are prohibitive. That’s why we decided to run our tests in the lab and develop a replica raspberry for training harvesting robots.”
A training tool for robots
For the uninitiated, picking a raspberry is no easy task. You have to support the berry from below, grasp it gently between your thumb and index finger, then pull carefully until it detaches from the receptacle – the part of the fruit that remains attached to the plant – and falls into the palm of your hand. To help harvesting robots get accustomed to this task, the CREATE engineers designed and built a silicone raspberry that can “tell” the robot how much pressure is being applied, both while the fruit is still attached to the receptacle and after it’s been released. The silicone raspberry’s properties can be adjusted to simulate the fruit’s resistance and require the robot to exert the necessary picking force. Thanks to this feedback, robots can trained to harvest the fruit without damaging it. “Our sensorized raspberry, coupled with a machine learning program, can teach a robot to apply just the right amount of force,” explains PhD student Kai Junge. “The hardest part is training the robot to loosen its grip once the raspberry detaches from the receptacle so that the fruit doesn’t get squashed. That’s hard to achieve with conventional robots.”

Kai Junge, PhD student and first author of the paper that will be presented at the RoboSoft 2022 conference. © Anne-Muriel Brouet/ EPFL
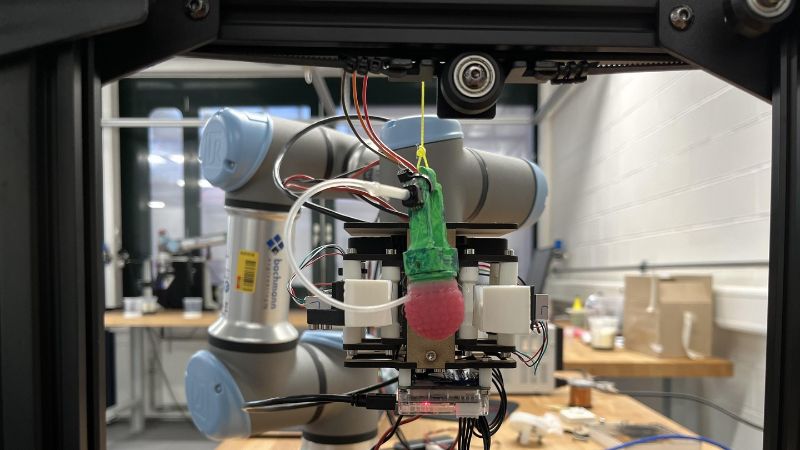
Beneath its unnaturally uniform shape and slightly translucent pink surface, CREATE’s replica raspberry is an impressive feat of engineering. Its flesh is made from silicone and its receptacle from 3D-printed plastic; it also contains a fluidic sensor consisting of a soft silicone tube to measure the compression force applied by the robot. The pulling force that holds the fruit and receptacle together is generated by two magnets.
For now, the lab’s harvesting robot is little more than a gripper with two 3D-printed fingers covered with a thin layer of silicone and attached to a robotic arm. Even so, the engineers had to sacrifice over a dozen raspberries to calibrate their gripper in the lab. They then carried out a series of tests, first picking the replica raspberry by hand and then using the robotic system.
While the CREATE team has demonstrated the proof of concept for their design, the technology itself is far from mature. “It’s incredibly challenging,” says Hughes. “So far we’ve been using a very simple feedback system in our robot. The next step will be to design and build more complex controllers so that robots can pick raspberries on a larger scale without crushing them.” The engineers are currently developing a camera system that will allow robots to not only “feel” raspberries, but also “see” where they’re located and whether they’re ready to be harvested. They plan to test their harvesting robot in the field this summer, at the height of the local raspberry season.
“This kind of system could be used to pick other berries too for example,” says Hughes. “We’d also like to develop technology for other soft fruit and apply this physical-twin concept to more complicated tasks like other berries, tomatoes, apricots or grapes .”
