Un robot-cueilleur s'exerce sur une framboise en silicone
La framboise est la reine des fruits rouges. Comment ne pas succomber devant cette pulpeuse bonbonnière écarlate où se pressent des dizaines de bulbes charnues, gorgées d’un nectar sucré, teinté d’acidité ? Mais sa finesse fait aussi sa faiblesse. Elle saigne à la moindre égratignure, se blesse sous une pression mineure. Les cultivateurs en connaissent les exigences, les consommateurs le prix. Et si un robot mettait ses actuateurs et ses senseurs au service des cueilleurs ? C’est le défi que tente de relever le Laboratoire de conception et de fabrication de robots informatique (CREATE) de l’EPFL.
Le problème de pénurie et du coût de la main-d’œuvre dans l’agriculture est loin d’être anodin et se chiffre en milliards de dollars de pertes annuelles. Il est d’autant plus marqué pour des cultures vulnérables comme celle des framboises. Il n’existe pas d’alternative satisfaisante à la cueillette à la main. « C’est extrêmement motivant d’essayer de trouver une solution à ce problème », s’enthousiasme Josie Hughes, professeure au CREATE. « Mais la saison des framboises est tellement courte et le fruit a tellement de valeur qu’on ne peut pas se permettre d’en gaspiller. De plus, les expériences sur le terrain sont très coûteuses et logistiquement compliquées. C’est pourquoi nous avons choisi de faire de la recherche agricole dans le labo en reproduisant une framboise et éduquant un robot cueilleur. »
Un outil éducatif pour robots
Pour qui n’a jamais cueilli une framboise, il faut savoir que l’opération n’a rien de trivial : il faut l’aborder par dessous, exercer une légère pression du pouce et de l’index au milieu du fruit et relâcher l’emprise sitôt qu’il se détache du réceptacle, la partie intérieure qui reste sur le plant, pour la laisser doucement glisser dans le creux de la main. CREATE a donc conçu et fabriqué une jumelle de la baie qui est capable de « dire » au (robot)-cueilleur la force qu’elle ressent, sur le réceptacle et une fois extraite. Les scientifiques peuvent en outre contrôler les caractéristiques de la framboise pour simuler la force nécessaire pour la cueillir. Le but est d’utiliser ce « retour » de la framboise pour entrainer des robots-cueilleurs afin qu’ils récoltent la baie sans lui faire de mal. « C’est un outil d’entrainement pour le robot, qui doit, à l’aide d’apprentissage automatique, perfectionner son geste, précise Kai Junge, assistant-doctorant au laboratoire CREATE. Le défi principal consiste à relâcher la pression une fois que la baie s’est détachée pour ne pas l’écraser, ce qui est difficile avec les robots traditionnels. »

Kai Junge, assistant-doctorant, premier auteur de l'article qui sera présenté à la conférence RoboSoft 2022. © Anne-Muriel Brouet/ EPFL
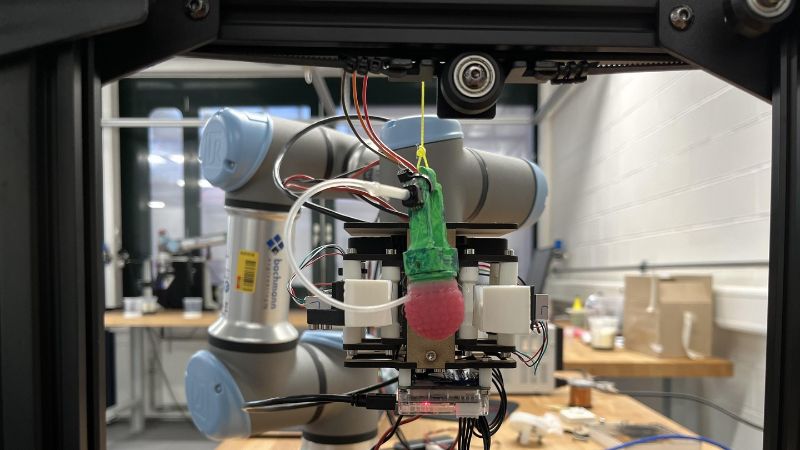
Sous son alignement de bulbes un peu trop régulier et son rose légèrement translucide, la framboise artificielle du CREATE est une merveille technologique. Elle reproduit le fruit, en silicone, et le réceptacle en PLA à l’aide d’une imprimante 3D. Un senseur fluidique, composé d’un serpentin en silicone mou à l’intérieur du fruit, permet de mesurer la pression exercée par le robot-cueilleur. Deux aimants, l’un dans le réceptacle, l’autre dans le fruit, reproduisent l’attachement des parties l’une à l’autre.
Le robot cueilleur reste à ce stade très basique : une pince imprimée en 3D dont les « doigts » sont recouverts d’une fine couche de silicone, et juchée sur un bras robotique. En laboratoire, il a quand même fallu sacrifier une quinzaine de framboises fraiches afin de le calibrer. L’équipe a ensuite procédé à de multiples essais : cueillette à la main de la framboise connectée, puis avec le système robotique.
À ce stade, le laboratoire a établi la preuve du concept, mais la technique est encore loin d’être mure. « Ce n’est vraiment pas facile, reconnaît Josie Hughes. Nous avons utilisé un système de retour très simple, mais nous devons désormais imaginer des contrôleurs plus complexes pour que ces robots puissent récolter des framboises sans les écraser. » C’est pourquoi e CREATE travaille maintenant à donner des yeux au robot afin qu’il puisse non seulement sentir la framboise, mais aussi la voir à l’aide de caméra, et ainsi estimer où elle se trouve ou si elle est prête à être cueillie. Cet été, lorsque la courte saison des framboises sera à son apogée dans le pays, les robots-cueilleurs devraient effectuer des tests en situation réelle.
« Ce type de mécanisme pourrait être utile pour d’autres baies, imagine la professeure. Nous voudrions aussi le développer pour d’autres fruits mous et utiliser le concept de jumeaux physiques pour des scénarios plus complexes comme la récolte d'autres baies, des tomates, des abricots ou du raisin. »
