Chirurgie robotisée: quatre mains valent mieux que deux
Des roboticiens et roboticiennes de l’EPFL ont combiné la manipulation de plusieurs membres avec une augmentation du contrôle partagé, permettant une avancée sans précédent dans le domaine de la chirurgie laparoscopique. Les résultats publiés dans The International Journal of Robotics Research confirment la faisabilité de cette installation en vue de réduire la charge de travail du chirurgien ou de la chirurgienne et d’améliorer la précision et la sécurité. Des spécialistes ont déjà été formés avec succès sur ce système et des essais cliniques sont en cours à Genève.
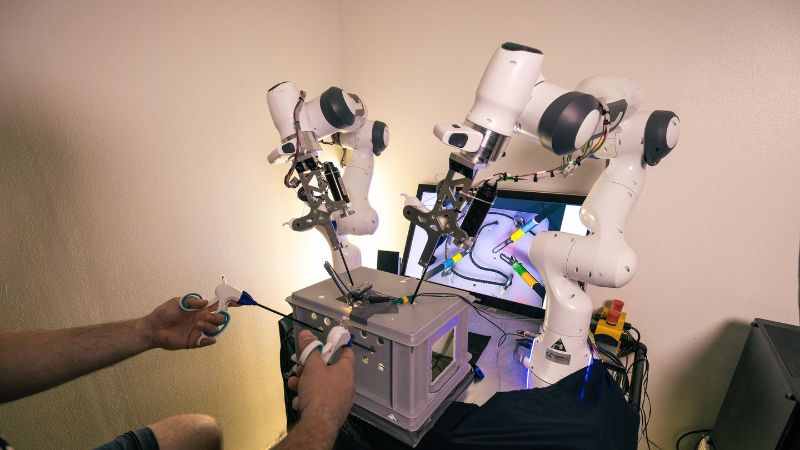
L’étroite collaboration entre le groupe de recherche REHAssist et le Laboratoire des algorithmes et systèmes d’apprentissage (LASA) a permis aux doctorants Jacob Hernandez et Walid Amanhoud et à toute l'équipe de recherche de mettre au point un système grâce auquel les chirurgiens commandent deux bras robotisés à l’aide de pédales d’interface haptique ayant cinq degrés de liberté. Chaque main contrôle un outil de manipulation, tandis qu’un pied contrôle la caméra ou l’endoscope et l’autre une pince motorisée. L’une des principales innovations de ce système est le contrôle partagé entre le chirurgien et les assistants robotisés. Grâce à la structure de contrôle, le chirurgien et les robots travaillent en collaboration au sein d’un même espace, tout en garantissant la précision et la sécurité absolument nécessaires dans la chirurgie laparoscopique.
Selon Mohammed Bouri, responsable du groupe REHAssist, «les actionneurs des pédales donnent à l’utilisateur ou l’utilisatrice des informations haptiques, qui guident le pied vers la cible comme s’il suivait un champ de force invisible, tout en veillant à ce que les mouvements erronés ne mettent pas en danger le patient.» Pour Mohamed Bouri, «Notre système ouvre de nouvelles possibilités aux chirurgiens pour effectuer des procédures laparoscopiques à 4 mains, permettant à une seule personne d'effectuer une tâche qui est généralement effectuée par deux, parfois trois personnes.»
Minimiser la fatigue
Le système robotique dirige parfois, dans le cadre d'un contrôle partagé, l'instrument du chirurgien, car il en prédit les mouvements. Lorsque vous faites un noeud par exemple, l'endoscope s'ajuste dans la bonne position et la pince peut s'écarter.
«Contrôler quatre bras simultanément, de surcroît avec ses pieds, est loin d'être de la routine et peut être fatigant. Pour améliorer davantage le contrôle, le système intègre un suivi visuel adaptatif des instruments de laparoscopie avec la caméra et l’assistance de saisie de la pince. De plus, une assistance est offerte pour une saisie plus précise des tissus » explique la Professeure Aude Billard, responsable du LASA. Mohamed Bouri ajoute qu'« en incorporant des assistants robotiques commandés au pied et des stratégies de contrôle partagé, nous réduisons la charge mentale et physique des chirurgiens et nous émettons l'hypothèse d'améliorer les résultats chirurgicaux ».
Collaboration avec les chirurgiens
Une étude détaillée avec des chirurgiens et chirurgiennes praticiens a été menée pour évaluer la facilité d’utilisation et l’efficacité du système. Selon le Docteur Enrico Bronnimann qui a pris part aux essais cliniques en cours en collaboration avec la Fondation suisse pour l’innovation et la formation en chirurgie (SFITS), «l'idée d'utiliser activement ses pieds pour effectuer une chirurgie assistée par robot est une bonne idée et certainement une compétence qui peut s'apprendre. J'aimerais la voir mise en œuvre dans la salle d'opération, peut-être sous la forme d'un cockpit éloigné du patient afin d'améliorer l'ergonomie ».
Si le système continue d'être testé et amélioré, les résultats publiés dans cette étude confirment la faisabilité de tâches de type chirurgical à quatre mains, sans formation approfondie. Les stratégies de contrôle partagé mises en œuvre dans le système ont prouvé qu’elles pouvaient réduire la charge, améliorer les performances, augmenter la fluidité et favoriser la coordination pendant les tâches de laparoscopie.
